publications
2025
-
 Variations of Augmented Lagrangian for Robotic Multi-Contact SimulationIEEE Transactions on Robotics (T-RO), 2025
Variations of Augmented Lagrangian for Robotic Multi-Contact SimulationIEEE Transactions on Robotics (T-RO), 2025 -
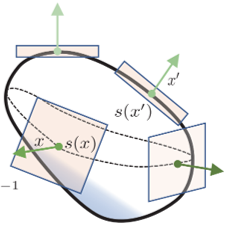
 Shape Abstraction via Marching Differentiable Support FunctionsIEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), 2025
Shape Abstraction via Marching Differentiable Support FunctionsIEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), 2025 -
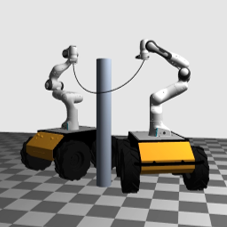
 Wrench Control of Dual-Arm Robot on Flexible Base with Supporting Contact SurfaceIEEE Transactions on Robotics (T-RO), 2025
Wrench Control of Dual-Arm Robot on Flexible Base with Supporting Contact SurfaceIEEE Transactions on Robotics (T-RO), 2025 -
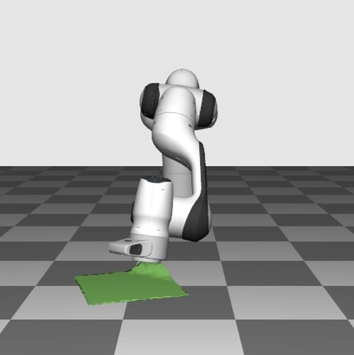
 Narrow Passage Path Planning using Collision Constraint InterpolationIEEE International Conference on Robotics and Automation (ICRA), 2025
Narrow Passage Path Planning using Collision Constraint InterpolationIEEE International Conference on Robotics and Automation (ICRA), 2025 -
 GPU-Accelerated Subsytem-Based ADMM for Large-Scale Interactive SimulationIEEE International Conference on Robotics and Automation (ICRA), 2025
GPU-Accelerated Subsytem-Based ADMM for Large-Scale Interactive SimulationIEEE International Conference on Robotics and Automation (ICRA), 2025 -
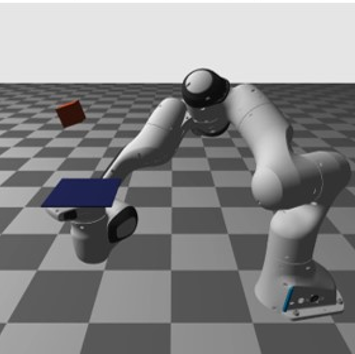
 Efficient Gradient-Based Inference for Manipulation Planning in Contact Factor GraphsIEEE International Conference on Robotics and Automation (ICRA), 2025
Efficient Gradient-Based Inference for Manipulation Planning in Contact Factor GraphsIEEE International Conference on Robotics and Automation (ICRA), 2025






2024
-
 Collision Detection between Smooth Convex Bodies Via Riemannian Optimization FrameworkIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Collision Detection between Smooth Convex Bodies Via Riemannian Optimization FrameworkIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

2023
-
 Uncertain Pose Estimation during Contact Tasks using Differentiable Contact FeaturesIn Robotics: Science and Systems (RSS), 2023
Uncertain Pose Estimation during Contact Tasks using Differentiable Contact FeaturesIn Robotics: Science and Systems (RSS), 2023 -
 Differentiable Dynamics Simulation Using Invariant Contact Mapping and Damped Contact ForceIn IEEE International Conference on Robotics and Automation (ICRA), 2023
Differentiable Dynamics Simulation Using Invariant Contact Mapping and Damped Contact ForceIn IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 Modular and Parallelizable Multibody Physics Simulation via Subsystem-Based ADMMIn IEEE International Conference on Robotics and Automation (ICRA), 2023
Modular and Parallelizable Multibody Physics Simulation via Subsystem-Based ADMMIn IEEE International Conference on Robotics and Automation (ICRA), 2023



2022
-
 Large-Dimensional Multibody Dynamics Simulation using Contact Nodalization and DiagonalizationIEEE Transactions on Robotics (T-RO), 2022
Large-Dimensional Multibody Dynamics Simulation using Contact Nodalization and DiagonalizationIEEE Transactions on Robotics (T-RO), 2022

2021
-
 Real-Time Physically-Accurate Simulation of Robotic Snap Connection ProcessIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
Real-Time Physically-Accurate Simulation of Robotic Snap Connection ProcessIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 -
 A Parallelized Iterative Algorithm for Real-Time Simulation of Long Flexible Cable ManipulationIn IEEE International Conference on Robotics and Automation (ICRA), 2021
A Parallelized Iterative Algorithm for Real-Time Simulation of Long Flexible Cable ManipulationIn IEEE International Conference on Robotics and Automation (ICRA), 2021

